Modelling dynamic networks
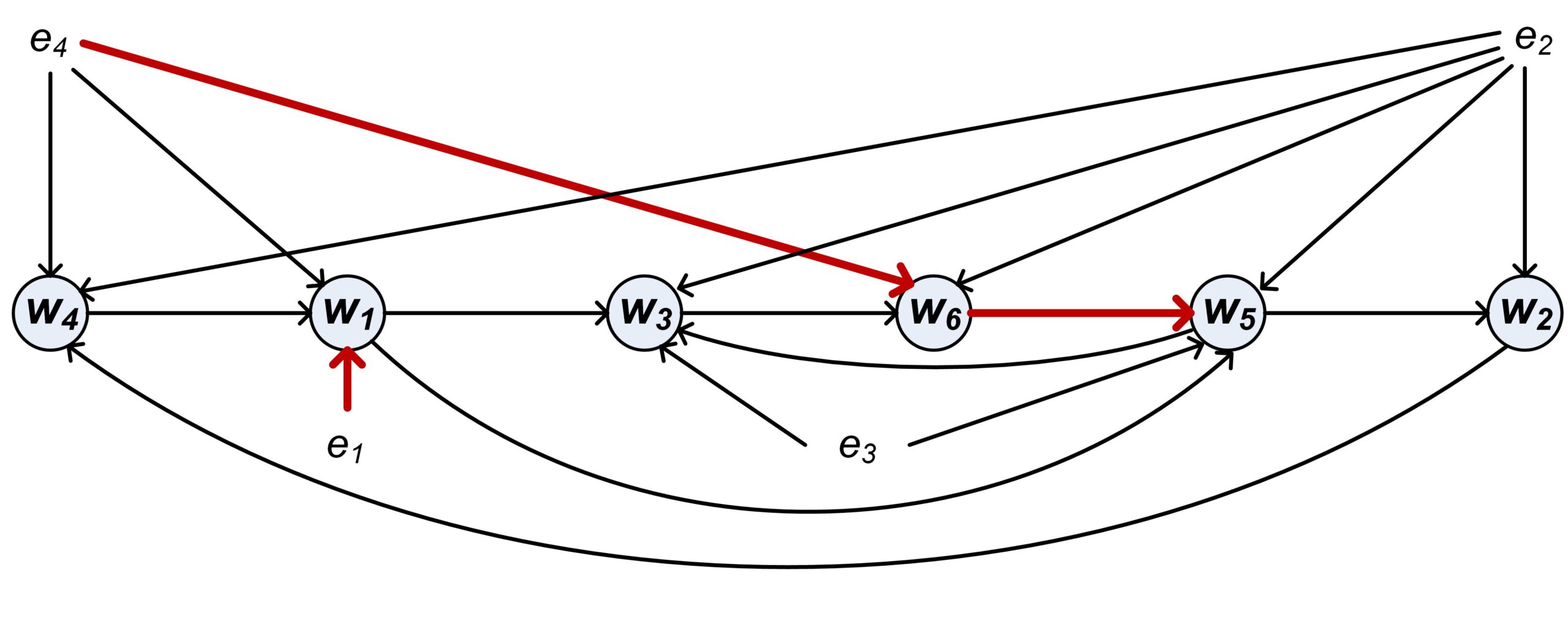
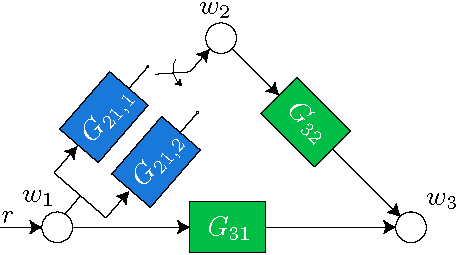
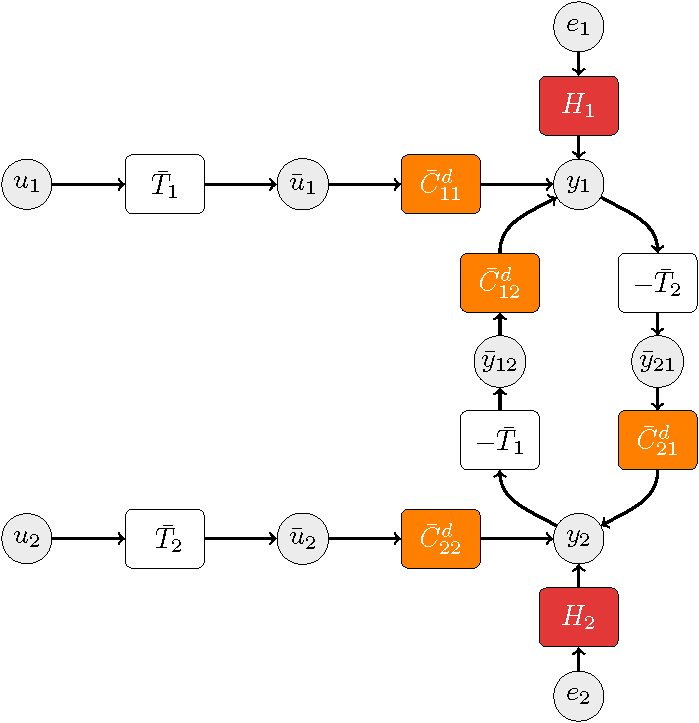
There are many different ways of representing interconnected dynamic systems. The format that we have chosen to use as a basis for our developments is the so-called module-framework, where linear dynamic systems are represented by transfer functions (modules) that are interconnected through signals, which are interconnected through summation points. External signals affect the network in the form of (measured) excitation/probing signals and (unmeasured) disturbance signals. The topological properties of the network are characterized by a graph, in which the signals are represented as nodes, and the modules are (directed) links between the nodes.
The network is slightly different from the often used state-representation of a dynamic network. This is motivated by our focus on data-driven modeling problems. Since in a large-scale system typically not all states can be measured, we have chosen for a framework where the node signals could be considered as those states that can possibly be measured. States that can not be measured are “hidden” in the dynamic transfer functions in the models.
The module representation has been introduced in Van den Hof et al. (2013) and has been adopted by several other research groups in this domain.
Relations between module and state-space representations have been explored in Kivits and Van den Hof (IFAC SYSYS 2018).